

Alle Produkte
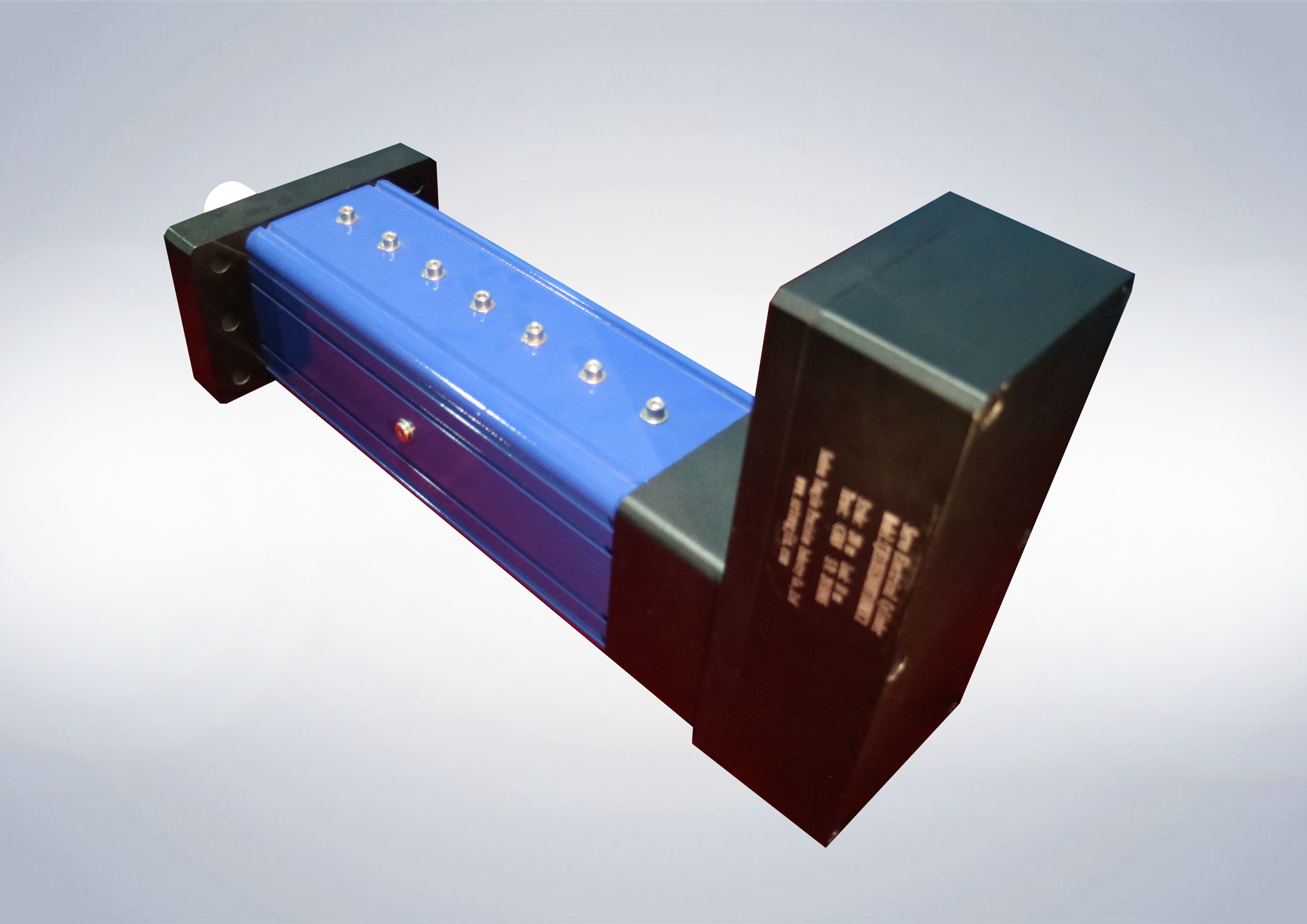
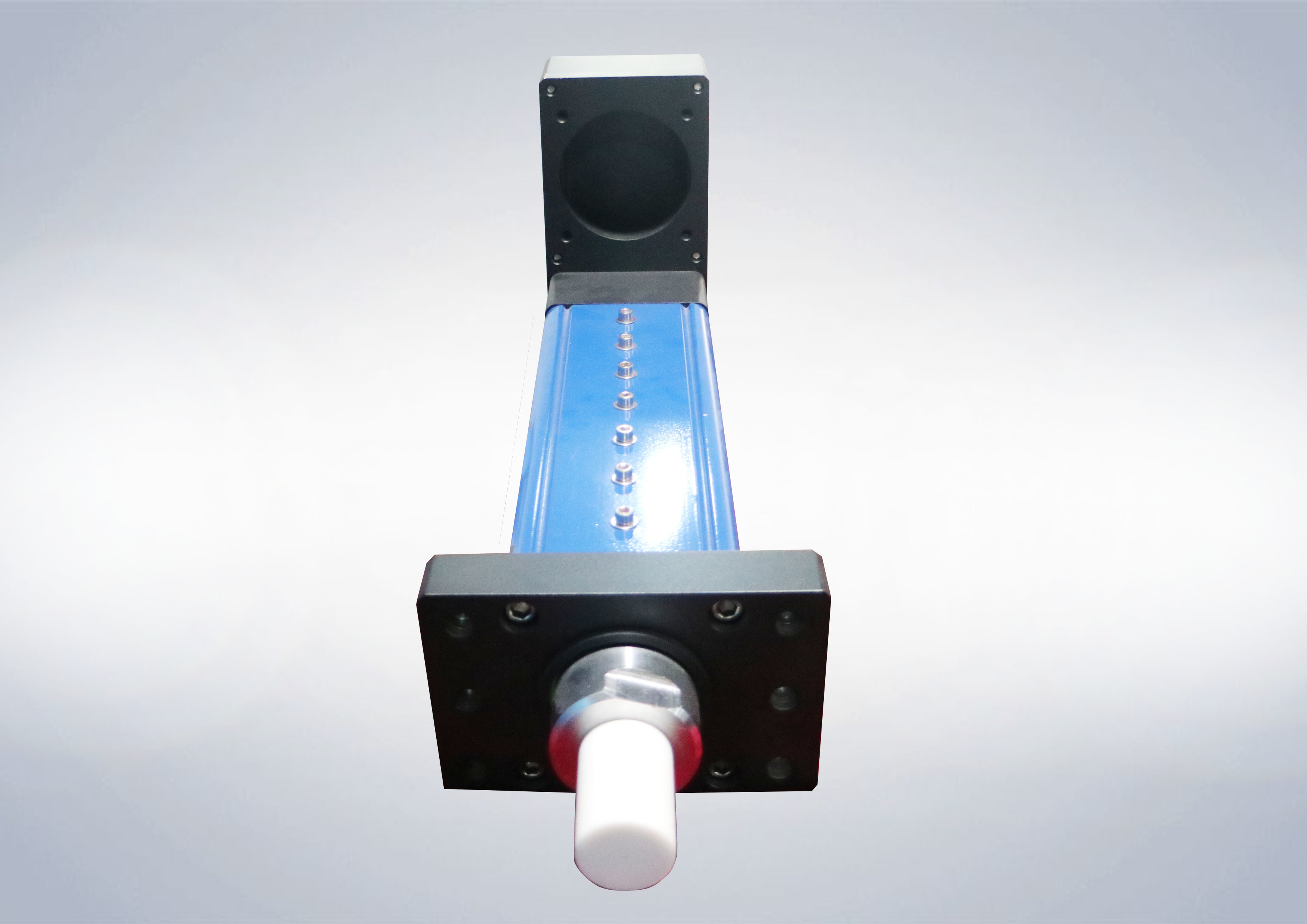
Direktanschluss-elektrischer Zylinder-Linear-Verstellgerät/Kugelumlaufspindel-blaue kleine elektrische Zylinder





| Herkunftsort | China |
|---|---|
| Markenname | TJ |
| Zertifizierung | ISO9001:2008,CE |
| Modellnummer | TJE135 |
| Min Bestellmenge | 1 Stück |
| Preis | negotiable |
| Verpackung Informationen | externe Verpackung: Karton oder nicht Holzkiste; Kissenverpackung: EPE-Schaum |
| Lieferzeit | 3-4 Wochen |
| Zahlungsbedingungen | T/T, 30% geleistete Anzahlung, 70% vor Lieferung |
| Versorgungsmaterial-Fähigkeit | 800 Stk. je Monat |
Produktdetails
| Material | Aluminium | Farbe | Standard: Marine blue&silvery, andere kann besonders angefertigt werden |
|---|---|---|---|
| Geschwindigkeit | bis zu 500mm/s | Wiederholbarkeit | ±0.01mm |
| Anschlag | 50 ~ 1200 mm | Ertrag-Kraft | bis zu 50KN |
| Bewegungsverbindungsart | linear/Ähnlichkeit | interne Gegendrehung | Mit/außen |
| SCHRAUBEN-FÜHRUNG | 10,20,50mm | Lastsverbindungsart | männlich, weiblich, U-Bolzen, Ballhauptscharnier und besonders angefertigt |
| Hervorheben | Linear-Verstellgerät 500mm/s des elektrischen Zylinders,Linearer Stellantrieb des Direktanschlusses,Direktanschluss-elektrischer Zylinder-Linear-Verstellgerät |
||
Produkt-Beschreibung
50~1200mm Direktanschluss-/Gurt-Verbindungs-Servoelektrischer Zylinder, Aluminiumlegierungs-Material schön und hell
1. Elektrische Servozylinder-Antriebsdrehmoment- und -energieauswahltabelle
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||||||||||
| Schrauben-Führung | [Millimeter] | 10 | ||||||||||||||||||||||
| Leistungsstärke | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | ||||||||
| Bewegungsbewertetes Drehmoment | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | ||||||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||||
| Zylinder-bewertete Kraft | [KN] | 3,30 | 4,85 | 6,62 | 4,96 | 7,28 | 9,92 | 9,91 | 14,55 | 19,85 | 16,52 | 24,26 | 30 | 30 | 30 | 30 | ||||||||
| Zylinder Max. Force | [KN] | 50 | ||||||||||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-330 | 0-330 | 0-220 | 0-165 | 0-110 | 0-100 | 0-65 | 0-100 | 0-30 | |||||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | ||||||||||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||||||||||
| Schrauben-Führung | [Millimeter] | 10 | |||||||||||||||||||||||
| Leistungsstärke | [Kilowatt] | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | 1,5 | 2,2 | 3 | ||||||||||||
| Bewegungsbewertetes Drehmoment | [N.M] | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | 4,77 | 7 | 9,55 | ||||||||||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||||||||||
| Zylinder-bewertete Kraft | [KN] | 3,30 | 4,85 | 6,62 | 9,91 | 14,55 | 19,85 | 16,52 | 24,26 | 30 | 30 | 30 | 30 | ||||||||||||
| Zylinder Max. Force | [KN] | 50 | |||||||||||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-330 | 0-110 | 0-100 | 0-65 | 0-100 | 0-30 | |||||||||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | ||||||||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||||||||
| Schrauben-Führung | [Millimeter] | 20 | |||||||||||||||||||||
| Leistungsstärke | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||
| Bewegungsbewertetes Drehmoment | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||
| Zylinder-bewertete Kraft | [KN] | 2,65 | 4,65 | 7,27 | 3,97 | 6,97 | 10,91 | 7,94 | 13,94 | 21,82 | 13,23 | 23,23 | 36,36 | 26,46 | 46,45 | 50 | |||||||
| Zylinder Max. Force | [KN] | 50 | |||||||||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-500 | 0-444 | 0-330 | 0-220 | 0-200 | 0-130 | 0-100 | 0-65 | |||||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | |||||||||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||||||||||
| Schrauben-Führung | [Millimeter] | 20 | ||||||||||||||||||||||
| Leistungsstärke | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||||||
| Bewegungsbewertetes Drehmoment | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||||
| Zylinder-bewertete Kraft | [KN] | 2,65 | 4,65 | 7,27 | 7,94 | 13,94 | 21,82 | 13,23 | 23,23 | 36,36 | 26,46 | 46,45 | 50 | |||||||||||
| Zylinder Max. Force | [KN] | 50 | ||||||||||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-330 | 0-220 | 0-200 | 0-130 | 0-100 | 0-65 | ||||||||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | ||||||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||||||
| Schrauben-Führung | [Millimeter] | 50 | |||||||||||||||||||
| Leistungsstärke | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||
| Bewegungsbewertetes Drehmoment | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||
| Zylinder-bewertete Kraft | [KN] | 1,06 | 1,85 | 2,91 | 1,59 | 2,78 | 4,37 | 3,17 | 5,56 | 8,73 | 5,29 | 9,26 | 14,56 | 10,58 | 18,52 | 29,11 | |||||
| Zylinder Max. Force | [KN] | 50 | |||||||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-500 | 0-500 | 0-500 | 0-330 | 0-250 | 0-165 | |||||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | |||||||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||||||||
| Schrauben-Führung | [Millimeter] | 50 | ||||||||||||||||||||
| Leistungsstärke | [Kilowatt] | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | 3 | 3,5 | 5,5 | |||||||||
| Bewegungsbewertetes Drehmoment | [N.M] | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | 9,55 | 16,7 | 26,25 | |||||||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||||||||
| Zylinder-bewertete Kraft | [KN] | 2,65 | 4,65 | 7,27 | 7,94 | 13,94 | 21,82 | 13,23 | 23,23 | 36,36 | 26,46 | 46,45 | 50 | |||||||||
| Zylinder Max. Force | [KN] | 50 | ||||||||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-500 | 0-500 | 0-330 | 0-250 | 0-165 | |||||||||||||||
3. Zusatzstückliste
![]()
| Name | Erklärung |
| 1- HNC-/CRHNCfußanbauteil | Wenn der Motor angebrachtes parall ist, wird dieses Teil für die Installierung von Lagern und von ReduziererEndstöpseln benutzt. |
| 2- FNC-/CRFNGflanschbefestigungsteil | Wenn der Motor angebrachtes parall ist, wird dieses Teil für die Installierung von Lagern und von ReduziererEndstöpseln benutzt. |
| 3- ZNCF-/CRZNGdrehzapfenanbauteil | Wenn der Motor angebrachtes parall ist, wird dieses Teil für die Installierung von Lagern und von ReduziererEndstöpseln benutzt. |
| 4- LNZG-/CRLNZGdrehzapfenlager | Für den Drehzapfen angebracht am Zylinderblock. |
| 5- SNC-Doppelt-Gabelkopflager | Für den Motor brachte paralleles an. |
| 6- Scharnier-Gabelkopflager LSNG kugelförmiges | Für den Motor brachte parallel, zum Tonnenlager an. |
| 7- Scharnier-Gabelkopflager LSNSG kugelförmiges | Für den Motor brachte parallel, zum Tonnenlager an und schweißte Synthese. |
| 8- SNCS-Doppelt-Gabelkopfanbauteil | Für den Motor brachte parallel, zum Tonnenlager an. |
| 9- LBG-Doppelt-Gabelkopflager | Für den Motor brachte parallel, zum Tonnenlager an. |
| aJ doppeltes Gabelkopfanbauteil | Für den Motor brachte paralleles an. |
| AA, Doppeltgabelkopfanbauteil | Für den Motor brachte parallel, zum Tonnenlager an. |
| AB, Doppeltgabelkopfanbauteil | Für den Motor brachte paralleles an. |
| Wechselstrom, Gabelkopflager | Für den Motor brachte paralleles an. |
| Gabelkopflager Scharnier der Anzeige kugelförmiges | Für den Motor brachte parallel, zum Tonnenlager an. |
| AE, Drehzapfenlager | Für in irgendeine Position des Zylinders angebracht werden. Wenn der Motor angebrachte Ähnlichkeit ist, könnte sich die Montageposition dem Motor nicht nähern. |
| Anbauteil des Fußes aF | Für den Motor brachte axial an. |
| AG, Gelenklager | Mit Tonnenlager. |
| ah Verbindungsflansch | Für die Kompensation von Radialabweichung. |
| Gabelkopf des Doppelten aI | Für das Zylinderschwingen in einer Fläche. |
| BJ, Selbst im Verbindungsteil | Für Kompensationsradialstrahl und Winkelabweichungen. |
| Scharnier-Gabelkopflager des Bas rechtwinkliges kugelförmiges | Für gemeinsames Lager. |
| doppelter Gabelkopf des BB | Für die Zylinderschwingeninstallation. |
| weil leitende Einheit | Verhindern Sie, dass Zylinder unter drehmomentstarkem sich verdreht |
| BD, Näherungsschalter | Für die Prüfung der Position, kann im Sensor-Befestigungsschlitz integriert werden. |
| ist Schlitzabdeckung | Für das Verhindern, dass Staub hereinkommt. |
| BF, parallele Installationskomponenten | Für den Motor brachte paralleles an. |
| BG, axiale Installationskomponenten | Für den Motor brachte axial an. |
4. Anwendungen
★ militärische Ausrüstung: Radar, Flugerbauer, Schwingenplattform des gepanzerten Fahrzeugs, spezielle Ausrüstung und andere Kriegsschiffe und Flugzeugluke, Eröffnung, Sitzhöhenverstellung, Waffentracking-system, Auslöser, experimentelle anhebende Unterstützung, Behälterartilleriehochs und tiefs-Richtungsaktionsanpassung, der Stoß des Raketentreibstoffs, die Öffnung der Ofentür, etc.
★ spezielle Ausrüstung: Fertigungsstraße der industriellen Automatisierung, Fließband, Logistikgetriebe, anhebende Plattform, Offsetsteuerung, Ventilsteuerung, beigeordneter Manipulator, Messer mechanische Ausrüstung CT Kama, Nahrung und Medizinindustrie, werkzeugmaschinen, Verpackmaschine der Industrie, selbstbewegende elektronische Presse, Textilausrüstungs-Wickelmaschineindex-bewegung, sterben Stellungssteuerung und klemmen, die Bohrung fest und bringen in Position.
★ experimentelle Ausrüstung: Simulationsplattform, Testbett, Wellenmaschine, Testgerät etc.
Diese Art ist für besonders passend:
das Servodrücken, die Motorenmontagenfertigungsstraße und Sie können unsere drückende Servosoftware auch zusammen kaufen.
![]()
![]()
Empfohlene Produkte
-
VIDEO

-