

Alle Produkte
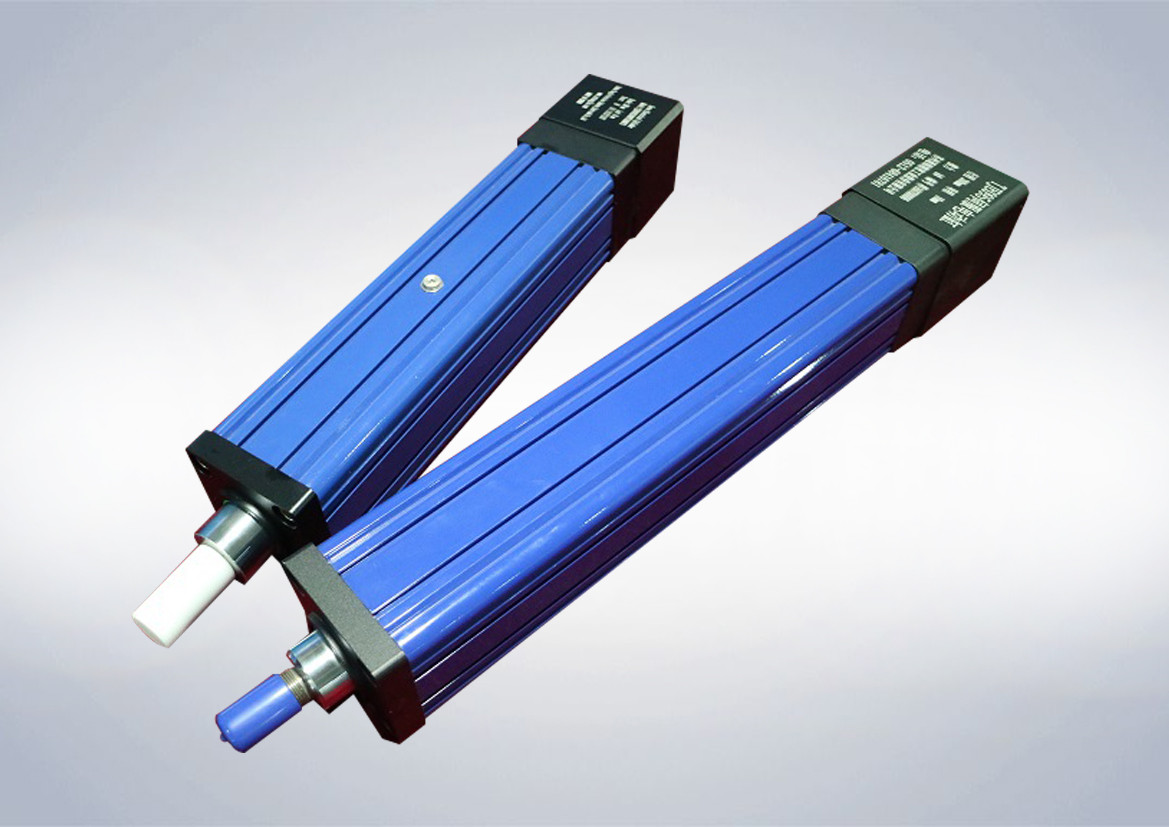
Hoher linearer elektrischer Zylinder der Starrheits-220V für lange Lebensdauer der militärischen Ausrüstung



| Herkunftsort | China |
|---|---|
| Markenname | TJ |
| Zertifizierung | ISO9001:2008,CE |
| Modellnummer | TJE095 |
| Min Bestellmenge | 1 Stück |
| Preis | negotiable |
| Verpackung Informationen | externe Verpackung: Karton oder nicht Holzkiste; Kissenverpackung: EPE-Schaum |
| Lieferzeit | 3-4 Wochen |
| Zahlungsbedingungen | T/T, 30% geleistete Anzahlung, 70% vor Lieferung |
| Versorgungsmaterial-Fähigkeit | 800 Stk. je Monat |
Produktdetails
| Material | Aluminium | Farbe | Standard: Marine blue&silvery, andere kann besonders angefertigt werden |
|---|---|---|---|
| Geschwindigkeit | bis zu 625mm/s | Wiederholbarkeit | ±0.01mm |
| Anschlag | 50~800mm | Ertrag-Kraft | bis zu 10KN |
| Bewegungsverbindungsart | linear/Ähnlichkeit | interne Gegendrehung | Mit/außen |
| SCHRAUBEN-FÜHRUNG | 4,5,6,8,10,25mm | Lastsverbindungsart | männlich, weiblich, U-Bolzen, Ballhauptscharnier und besonders angefertigt |
| Hervorheben | wasserdichtes Linear-Verstellgerät 220V,Schnelles Linear-Verstellgerät,Linearer elektrischer Zylinder der militärischen Ausrüstung |
||
Produkt-Beschreibung
50~800mm Kugelumlaufspindel-/Rollen-Schneckengetriebe-Servoelektrischer Zylinder, Match mit vielen Arten Motoren
1. Warum wählen Sie uns?
1. Kompaktbauweise und kleines Maß.
2. Hohe Starrheit, niedrige Untätigkeit und schnelle Antwort.
3. Hohe Zuverlässigkeit und lange Lebensdauer.
4. Energiesparende &less Geräusche.
5. Bequeme Versammlung und Gebrauch, einfache Wartung.
6. Eine Jahre Qualitätssicherung, lebenslanger Wartungsservice.
2.Product Modell Definition
Beispiel: DIE110 S300 B R 08 B M C 2 P11 O/C N/P
|
Die110—Reihenein.
TJE040: 44×44mm TJE065: 64×64mm TJE075: 75×75mm TJE095: 93×93mm TJE110: 111×111mm TJE135: 134×134mm |
08 — Schrauben-Führung
TJE040: 4mm TJE065: 4, 5, 10, 16,20mm TJE075: 4, 5, 10, 20, 40mm TJE095: 4, 5, 6, 8, 10, 25mm TJE110: 5, 6, 8, 10, 20, 32mm TJE135: 10, 20, 50mm |
2-Number des Endschalters
(Nichterfüllung ist normalerweise offener NPN-Schalter) |
|
S300—effektiverAnschlag
TJE040: 50-200mm TJE065: 50-250mm TJE075: 50-600mm TJE095: 50-800mm TJE110: 50-1000mm TJE135: 50-1200mm |
B-Motor, der Art anbringt
B: Parallel |
O/C-Limit Schalter
O: Normalerweise offenes C: Normalerweise nah |
|
B-Schrauben-Art
: Gipfel-Schraube B: Kugelumlaufspindel C: Rollen-Schraube |
M-Zylinder, der Art anbringt
M1: Doppelter Seitenberg M2: Seiten-turnnion Berg M3: Vorderer Flanschberg M4: Hinterer Flanschberg M5: Hinterer Gabelkopfberg M6: Berg der hinteren Welle MX: Besonders angefertigt |
N/P-Sensing Art
N: NPN P: PNP |
|
R-Anti-Rotation
R: Mit T: Ohne (TJE040 immer ohne diese Funktion)
|
C — Lasts-Verbindungsart
C1: Mann C2: Frau C3: U-Bolzen C4: Ballhauptscharnier CX: Besonders angefertigt |
Kennzeichen:
1) Um den effektiven Anschlag sicherzustellen, müssen zwei Enden aufgehobener 5mm Raum sein.
2) Der Sensor könnte nicht auf der gleichen Seite des Motors angebracht werden, wenn der Motor angebracht paralleles ist.
3. Elektrisches Servozylinder-Antriebs-Drehmoment
Und Energie-Auswahl-Tabelle
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 4 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 |
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 |
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Zylinder-bewertete Kraft | [KN] | 3,53 | 4,42 | 6,61 | 5,29 | 6,63 | 9,91 | 10,58 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-200 | 0-130 |
0-65
|
0-40 | 0-20 | ||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 4 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | |||
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | |||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | |||
| Zylinder-bewertete Kraft | [KN] | 3,53 | 4,42 | 6,61 | 10,58 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | |||
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-200 |
0-65
|
0-40 | 0-20 | |||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 5 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 |
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 |
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Zylinder-bewertete Kraft | [KN] | 2,82 | 3,54 | 5,28 | 4,23 | 5,38 | 7,92 | 8,47 | 10,61 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-250 | 0-165 |
0-80
|
0-50 | 0-25 | ||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | ||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||
| Schrauben-Führung | [Millimeter] | 5 | |||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | ||||
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | ||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Zylinder-bewertete Kraft | [KN] | 2,82 | 3,54 | 5,28 | 8,47 | 10,61 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | ||||
| Zylinder Max. Force | [KN] | 10 | |||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-250 |
0-80
|
0-50 | 0-25 | ||||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 6 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 |
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 |
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Zylinder-bewertete Kraft | [KN] | 2,35 | 2,94 | 4,4 | 3,53 | 4,41 | 6,6 | 7,06 | 8,82 | 10 | 10 | 10 | 10 | 10 | 10 | 10 |
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-300 | 0-200 |
0-100
|
0-60 | 0-30 | ||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | ||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||
| Schrauben-Führung | [Millimeter] | 6 | |||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | ||||
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | ||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Zylinder-bewertete Kraft | [KN] | 2,35 | 2,94 | 4,4 | 7,06 | 8,82 | 10 | 10 | 10 | 10 | 10 | 10 | 10 | ||||
| Zylinder Max. Force | [KN] | 10 | |||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-300 |
0-100
|
0-60 | 0-30 | ||||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 8 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 |
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 |
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Zylinder-bewertete Kraft | [KN] | 1,76 | 2,21 | 3,30 | 2,65 | 3,31 | 4,96 | 5,29 | 6,62 | 9,91 | 8,82 | 10 | 10 | 10 | 10 | 10 |
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-400 | 0-265 |
0-130
|
0-80 | 0-40 | ||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | ||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||
| Schrauben-Führung | [Millimeter] | 8 | |||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | ||||
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | ||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Zylinder-bewertete Kraft | [KN] | 1,76 | 2,21 | 3,30 | 5,29 | 6,62 | 9,91 | 8,82 | 10 | 10 | 10 | 10 | 10 | ||||
| Zylinder Max. Force | [KN] | 10 | |||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-400 |
0-130
|
0-80 | 0-40 | ||||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 10 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 |
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 |
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Zylinder-bewertete Kraft | [KN] | 1,411 | 1,764 | 2,519 | 2,519 | 2,117 | 2,646 | 4,233 | 5,292 | 7,557 | 7,055 | 8,82 | 10 | 10 | 10 | 10 |
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 | 0-330 |
0-165
|
0-100 | 0-50 | ||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | ||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||
| Schrauben-Führung | [Millimeter] | 10 | |||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | ||||
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | ||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Zylinder-bewertete Kraft | [KN] | 1,411 | 1,764 | 2,519 | 4,233 | 5,292 | 7,557 | 7,055 | 8,82 | 10 | 10 | 10 | 10 | ||||
| Zylinder Max. Force | [KN] | 10 | |||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-500 |
0-165
|
0-100 | 0-50 | ||||||||||||
| Bewegungsverbindung | Parallel (Riemenantrieb) | |||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | |||||||||||
| Schrauben-Führung | [Millimeter] | 25 | ||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,4 | 0,8 | 1,5 | 0,4 | 0,8 | 1,5 | 0,4 | 0,8 | 1,5 |
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 |
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 |
| Zylinder-bewertete Kraft | [KN] | 0,57 | 0,71 | 1,06 | 0,85 | 1,06 | 1,59 | 1,70 | 2,12 | 3,17 | 2,84 | 3,53 | 5,29 | 5,68 | 7,06 | 10,58 |
| Zylinder Max. Force | [KN] | 10 | ||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-625 | 0-625 |
0-415
|
0-250 | 0-125 | ||||||||||
| Bewegungsverbindung | Linear (Kopplungsdirektantrieb) | ||||||||||||||||
| Reduzierungsverhältnis | 1 | 1,5 | 3 | 5 | 10 | ||||||||||||
| Schrauben-Führung | [Millimeter] | 10 | |||||||||||||||
| Leistungsstärke | [Kilowatt] | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | 0,8 | 1 | 1,5 | ||||
| Bewegungsbewertetes Drehmoment | [N.M] | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | 2,55 | 3,19 | 4,77 | ||||
| Bewegungsnenndrehzahl | [r/min] | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | 3000 | ||||
| Zylinder-bewertete Kraft | [KN] | 0,57 | 0,71 | 1,06 | 1,70 | 2,12 | 3,17 | 2,84 | 3,53 | 5,29 | 5,68 | 7,06 | 10,58 | ||||
| Zylinder Max. Force | [KN] | 10 | |||||||||||||||
| Zylinder-Geschwindigkeit | [mm/s] | 0-625 |
0-415
|
0-250 | 0-125 | ||||||||||||
4. Anwendungen
★ militärische Ausrüstung: Radar, Flugerbauer, Schwingenplattform des gepanzerten Fahrzeugs, spezielle Ausrüstung und andere Kriegsschiffe und Flugzeugluke, Eröffnung, Sitzhöhenverstellung, Waffentracking-system, Auslöser, experimentelle anhebende Unterstützung, Behälterartilleriehochs und tiefs-Richtungsaktionsanpassung, der Stoß des Raketentreibstoffs, die Öffnung der Ofentür, etc.
★ spezielle Ausrüstung: Fertigungsstraße der industriellen Automatisierung, Fließband, Logistikgetriebe, anhebende Plattform, Offsetsteuerung, Ventilsteuerung, beigeordneter Manipulator, Messer mechanische Ausrüstung CT Kama, Nahrung und Medizinindustrie, werkzeugmaschinen, Verpackmaschine der Industrie, selbstbewegende elektronische Presse, Textilausrüstungs-Wickelmaschineindex-bewegung, sterben Stellungssteuerung und klemmen, die Bohrung fest und bringen in Position.
★ experimentelle Ausrüstung: Simulationsplattform, Testbett, Wellenmaschine, Testgerät etc.
Diese Art ist für besonders passend:
(1) Strickmaschine der Verzerrung, schnelle Geschwindigkeit und schnelle Antwort
(2) können das Servodrücken, die Motorenmontagenfertigungsstraße und Sie unser auch kaufen drückende Servosoftware zusammen.
![]()
5. Zusatzstückliste
![]()
| Name | Erklärung |
| 1- HNC-/CRHNCfußanbauteil | Wenn der Motor angebrachtes parall ist, wird dieses Teil für die Installierung von Lagern und von ReduziererEndstöpseln benutzt. |
| 2- FNC-/CRFNGflanschbefestigungsteil | Wenn der Motor angebrachtes parall ist, wird dieses Teil für die Installierung von Lagern und von ReduziererEndstöpseln benutzt. |
| 3- ZNCF-/CRZNGdrehzapfenanbauteil | Wenn der Motor angebrachtes parall ist, wird dieses Teil für die Installierung von Lagern und von ReduziererEndstöpseln benutzt. |
| 4- LNZG-/CRLNZGdrehzapfenlager | Für den Drehzapfen angebracht am Zylinderblock. |
| 5- SNC-Doppelt-Gabelkopflager | Für den Motor brachte paralleles an. |
| 6- Scharnier-Gabelkopflager LSNG kugelförmiges | Für den Motor brachte parallel, zum Tonnenlager an. |
| 7- Scharnier-Gabelkopflager LSNSG kugelförmiges | Für den Motor brachte parallel, zum Tonnenlager an und schweißte Synthese. |
| 8- SNCS-Doppelt-Gabelkopfanbauteil | Für den Motor brachte parallel, zum Tonnenlager an. |
| 9- LBG-Doppelt-Gabelkopflager | Für den Motor brachte parallel, zum Tonnenlager an. |
| aJ doppeltes Gabelkopfanbauteil | Für den Motor brachte paralleles an. |
| AA, Doppeltgabelkopfanbauteil | Für den Motor brachte parallel, zum Tonnenlager an. |
| AB, Doppeltgabelkopfanbauteil | Für den Motor brachte paralleles an. |
| Wechselstrom, Gabelkopflager | Für den Motor brachte paralleles an. |
| Gabelkopflager Scharnier der Anzeige kugelförmiges | Für den Motor brachte parallel, zum Tonnenlager an. |
| AE, Drehzapfenlager | Für in irgendeine Position des Zylinders angebracht werden. Wenn der Motor angebrachte Ähnlichkeit ist, könnte sich die Montageposition dem Motor nicht nähern. |
| Anbauteil des Fußes aF | Für den Motor brachte axial an. |
| AG, Gelenklager | Mit Tonnenlager. |
| ah Verbindungsflansch | Für die Kompensation von Radialabweichung. |
| Gabelkopf des Doppelten aI | Für das Zylinderschwingen in einer Fläche. |
| BJ, Selbst im Verbindungsteil | Für Kompensationsradialstrahl und Winkelabweichungen. |
| Scharnier-Gabelkopflager des Bas rechtwinkliges kugelförmiges | Für gemeinsames Lager. |
| doppelter Gabelkopf des BB | Für die Zylinderschwingeninstallation. |
| weil leitende Einheit | Verhindern Sie, dass Zylinder unter drehmomentstarkem sich verdreht |
| BD, Näherungsschalter | Für die Prüfung der Position, kann im Sensor-Befestigungsschlitz integriert werden. |
| ist Schlitzabdeckung | Für das Verhindern, dass Staub hereinkommt. |
| BF, parallele Installationskomponenten | Für den Motor brachte paralleles an. |
| BG, axiale Installationskomponenten | Für den Motor brachte axial an. |
Empfohlene Produkte